Atlas od Boston Dynamics: Robot, który nosi lodówki i uczy się w ciągu jednej nocy – przełom w robotyce!

Firma Boston Dynamics, która od lat bawi nas saltami i tańcami swoich robotów, w końcu postanowiła, że nadszedł czas, by wysłać swoich podopiecznych do prawdziwej pracy. Nowe wideo z elektrycznym humanoidem Atlas nie demonstruje akrobatycznych trików, lecz surową rzeczywistość codzienności magazynu: przenoszenie ciężkich i niewygodnych przedmiotów. I choć widok robota obejmującego lodówkę wywołuje lekki uśmiech, za tym stoją technologie, które sprawiają, że koncepcja „powstania maszyn” staje się nieco bardziej realna, przynajmniej w ramach stref przemysłowych.
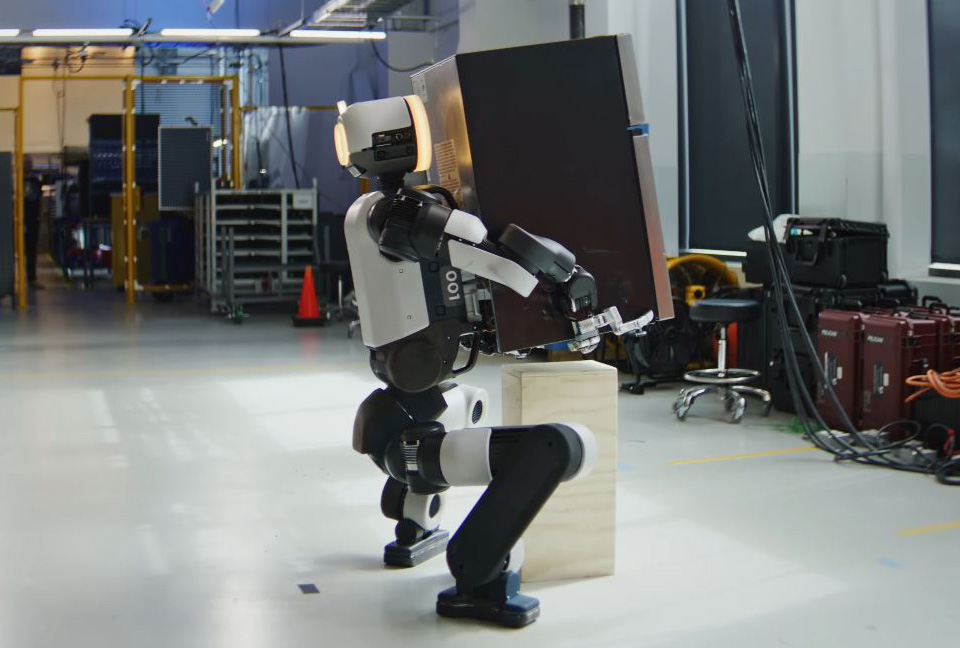
Żelazne mięśnie i lodówki
W centrum nowej demonstracji znajduje się Atlas, który pewnie manipuluje mini-lodówką ważącą około 23 kilogramów. Jednak inżynierowie zapewniają, że to tylko rozgrzewka: podczas testów urządzenie z powodzeniem radziło sobie z ładunkami ponad 45 kilogramów. Ważne jest nie samo podnoszenie wagi, ale to, jak robot to robi. Boston Dynamics podkreśla, że Atlas nie opiera się już tylko na prostym chwytaniu manipulatorami. Wykorzystuje całe ciało: opiera się, grupuje i uwzględnia inercję obiektu, co przypomina ruchy człowieka, który stara się wciągnąć pralkę na piąte piętro bez windy.
Miliony godzin w symulacji w jedną noc
Główny przełom miał miejsce nie w „żelazie”, ale w umysłach. Szkolenie robota odbywa się na zasadzie uczenia się z wzmocnieniem (reinforcement learning). Zamiast kodować każdy ruch, deweloperzy każą Atlasowi trenować w cyfrowej rzeczywistości. Dzięki potężnym procesorom graficznym robot „przeżywa” miliony godzin w wirtualnych symulacjach, gdzie upada, popełnia błędy i ostatecznie znajduje optymalną równowagę do utrzymania wagi.
Najciekawsze jest tu pokonywanie różnicy między symulacją a rzeczywistością (sim-to-real gap). Jeśli wcześniej przenoszenie umiejętności z komputera na „żelazo” zajmowało tygodnie żmudnej pracy, to teraz nowy model zachowania adaptuje się do fizycznego świata w zaledwie 24 godziny. To oznacza, że jeśli wieczorem inżynierowie wymyślą nowy typ zadania, to już następnego dnia Atlas będzie je wykonywał w fabryce.
Śmierć hydrauliki i nieskończone stawy
Nowa generacja Atlasa całkowicie zrezygnowała ze skomplikowanej i kapryśnej hydrauliki na rzecz napędów elektrycznych. To uczyniło platformę prostszą, bardziej niezawodną i, co ważne dla biznesu, tańszą w produkcji. W konstrukcji użyto tylko dwóch typów aktuatorów, a kończyny wykonano symetrycznie. Dzięki temu robot nie musi obracać całym korpusem a jedynie zacząć ruch w przeciwnym kierunku, odwracając głowę i miednicę o 180 stopni.
Brak kabli w stawach zapewnia im możliwość nieskończonego obrotu. To daje Atlasowi taką elastyczność, której pozazdrościłby każdy jogin. Takie podejście to bezpośrednie wyzwanie dla konkurentów, takich jak Tesla ze swoim Optimusem czy Figure AI. Podczas gdy inni starają się uczynić robota bardziej podobnym do człowieka, Boston Dynamics czyni go bardziej efektywnym niż człowiek, ignorując anatomiczne ograniczenia takie jak niemożność odwrócenia kolan w inny sposób.
Ciekawe, że na tle sukcesów w przygotowaniu fizycznym, inne firmy koncentrują się na społecznej interakcji maszyn. Na przykład, niedawno Noetix przedstawił bionicznego robota z „żywym” spojrzeniem, co wygląda jak próba nadania maszynom więcej ludzkiego oblicza, podczas gdy Atlas uczy się być idealnym dźwigarem.